⚠ 转载请注明出处:作者:ZobinHuang,更新日期:Mar.8 2022

本作品由 ZobinHuang 采用 知识共享署名-非商业性使用-禁止演绎 4.0 国际许可协议 进行许可,在进行使用或分享前请查看权限要求。若发现侵权行为,会采取法律手段维护作者正当合法权益,谢谢配合。
目录
有特定需要的内容直接跳转到相关章节查看即可。
路与连通性
途径 (Walk)
`G` 的一条
途径中边数称为途径的
迹 (Trail)
路 (Path)
起点和终点重合的途径,迹和路分别称为图的
距离 (Distance)
图中点 `u` 与 `v` 的最短路的长度称为 `u` 与 `v` 之间的距离,记为 `d(u,v)`。如果 `u` 和 `v` 之间不存在路,则定义 `d(u,v)=\infty`。
连通性 (Connection)
如果图中点 `u` 与 `v` 之间存在路,则说点 `u` 与 `v` 是
规定一个顶点和它自身是连通的。
如果图 `G` 中的任意两点是连通的,则说图 `G` 是一个
图 `G` 中的每一个极大连通子图称为图 `G` 的
直径 (Diameter)
定义连通图 `G` 的直径为: `d(G)=max{d(u,v)|u,v\inV(G)}`。如果 `G` 不连通,则定义 `d(G)=\infty`。
上面的定理可以采用
连通图的性质
我们给出连通图的两个性质。
证明过程很简单,分为两种情况: 对于 `\forall u,v \in V(\bar{G})`,
- 若 `u`, `v` 属于 `G` 的同一分支,设 `w` 是与 `u`, `v` 处于不同分支中的点,则在 `\bar{G}` 中,`u` 与 `w`,`v` 与 `w` 分别相邻。于是 `u` 与 `v` 在 `\bar{G}` 中是连通的;
- 若 `u`, `v` 属于 `G` 的不同分支,则`u` 与 `v` 在 `\bar{G}` 中必然是连通的
选择 `G` 的任意两点 `u` 和 `v`,这个定理的证明过程分为两种情况:
- 若 `u` 和 `v` 相邻,则无需证明;
-
若 `u` 和 `v` 不相邻,我们可以从这个图的特殊性入手,得到:
`|N(u)| \ge \delta(G) \ge \frac{n-1}{2}`, `|N(v)| \ge \delta(G) \ge \frac{n-1}{2}`,故
`|N(u)|+|N(v)| \ge 2 \cdot \delta(G) \ge n-1`,故
`|N(u) \cap N(v)| = |N(u)| + |N(v)| - |N(u) \cup N(v)| \ge n-1 - (n-2) = 1`
也即 `u` 和 `v` 至少有一个公共邻点
最短路算法
赋权图
在图 `G` 的每条边上标上一个实数 `\omega(e)` 后,称 `G` 为
若 `H` 是赋权图 `G` 的一个子图, 称 `W(H)=\sum_{e\inE(H)}\omega(e)` 为子图H的权值。
设 `G` 为边赋权图。`u` 与 `v` 是 `G` 中两点,在连接 `u` 与 `v` 的所有路中,路中各边权值之和最小的路,称为 `u` 与 `v` 间的
动态规划
传统的
而
Dijkstra 算法
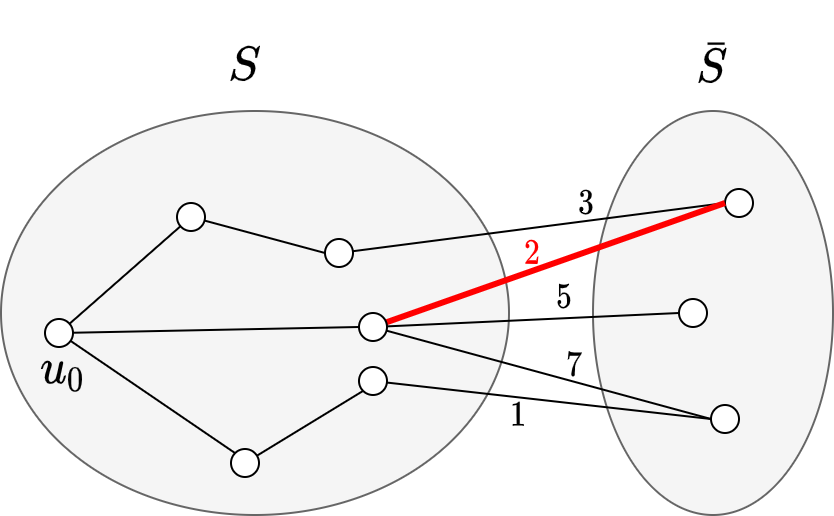
Dijkstra 简单来说,就是把整个图分为两部分: 由未确定 `d(u_0, v')` 的顶点 `v'` 构成的子图 `\bar{S}`,以及由已经确定 `d(u_0, v)` 的顶点 `v` 构成的子图 `S`。算法的每次迭代,就是在子图 `S` 和 `\bar{S}` 之间的边界边上选取一条权重最小的边界边,然后把对应的位于 `\bar{S}` 的顶点加入到 `S` 中,形成新的 `S` 和 `\bar{S}`。算法初始化的时候,`S` 仅包含 `u_0` 一个顶点; 算法结束的时候,`\bar{S}` 将变为空集。